
Designing Structer
The autonomous catamaran was developed through a structured engineering process with a strong focus on reliability, performance, and readiness for competition environments such as RoboBoat. From the initial design phase, the primary goal was to create a platform that balances hydrodynamic efficiency with structural robustness, ensuring consistent operation under real-world racing and mission conditions.
The design process began with the selection of a catamaran hull form to maximize stability, reduce hydrodynamic resistance, and provide a reliable base for autonomous navigation systems. Hydrodynamic performance and structural strength were treated as complementary but independently optimized aspects of the vehicle. This decoupled approach allowed the team to improve on-water behavior without compromising hull integrity or payload capacity.
To support design decisions, comprehensive hydrodynamic and structural analyses were conducted throughout development. Hydrodynamic evaluations focused on stability, drag characteristics, and wave interaction, directly influencing hull geometry and spacing. In parallel, structural analyses assessed load distribution, stress concentrations, and deformation under expected operational and race-induced conditions. These analyses ensured that the vehicle could withstand dynamic forces encountered during high-speed maneuvers, environmental disturbances, and prolonged autonomous missions.
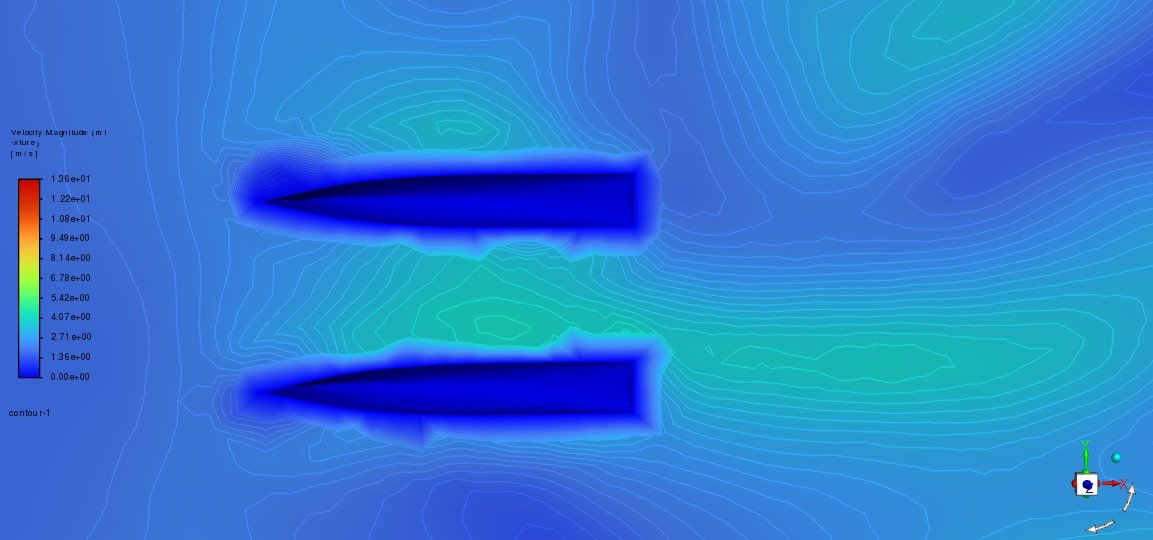
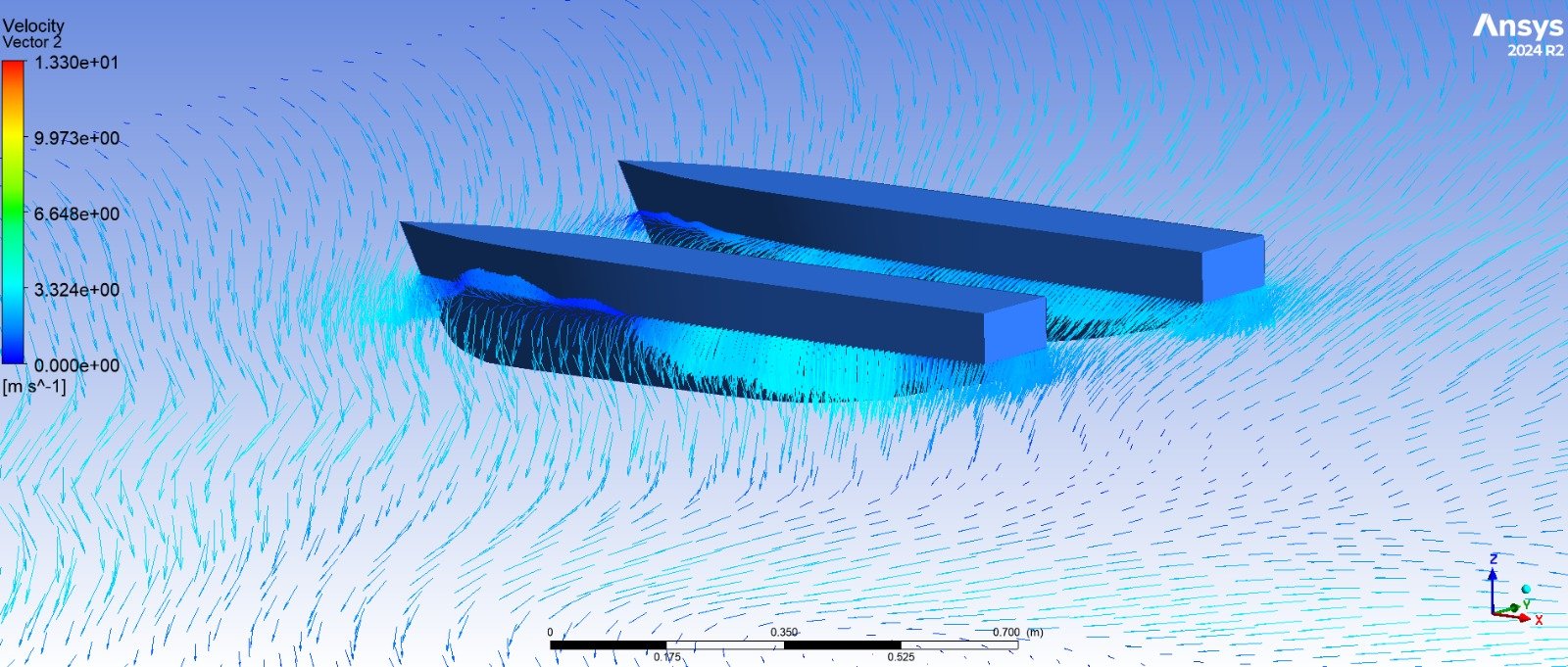
Insights gained from these simulations guided multiple design iterations, leading to targeted structural reinforcements and weight optimization. This iterative, analysis-driven process resulted in a platform that is both lightweight and mechanically resilient, aligning with the performance demands of RoboBoat missions.
The final design demonstrates a high level of engineering maturity. Analysis results confirm that the autonomous catamaran is stable, structurally safe, and capable of reliable operation in competitive racing scenarios. This development process reflects the team’s commitment to sound engineering principles, risk-aware design, and delivering a robust autonomous system ready for RoboBoat challenges and future scalability.
Digital Design
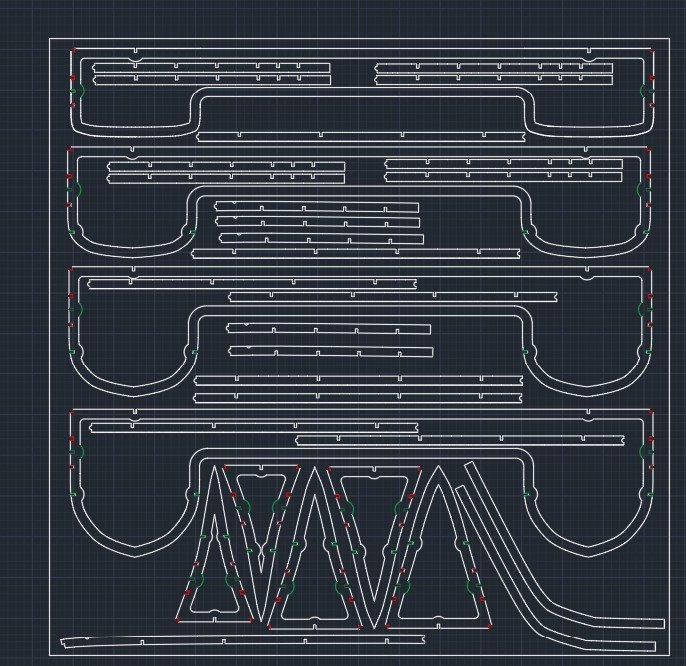
The construction process began with the creation of the vehicle’s internal skeleton, which was precisely designed in Autodesk to ensure dimensional accuracy and structural balance. This digital design phase allowed the team to optimize load paths and geometry before moving into physical production.
Skeleton & Shaping
Following the design phase, the skeleton was carefully cut from birch plywood, selected for its strength and reliability, and then shaped and refined using balsa wood to achieve the desired hull form while keeping the structure lightweight. This step defined the fundamental geometry of the vehicle and laid the groundwork for its hydrodynamic performance.

Fiberglass Lamination
To ensure long-term durability and full water resistance, five layers of fiberglass, carbonfiber and epoxy were applied over the hull. This lamination process formed the core structural shell of the vehicle, significantly increasing strength while protecting the internal components from harsh marine conditions.

Final Painting
Finally, the vehicle was completed with a high-quality paint coating, providing both environmental protection and a clean, professional appearance. This final step unified the design visually and marked the completion of the vehicle’s exterior, resulting in a robust, mission-ready autonomous platform.

See Vehıcle in Action
The First Swim Test

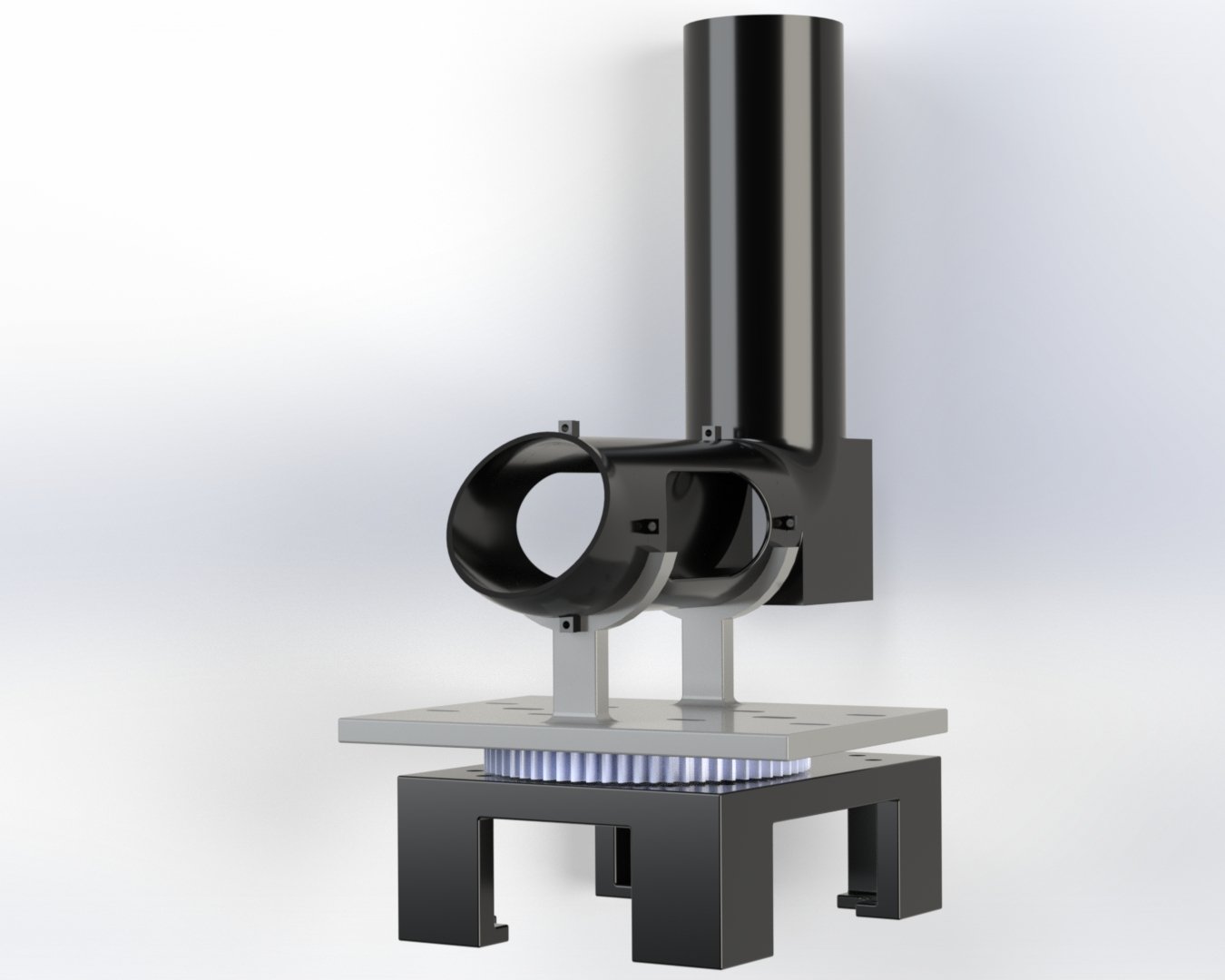
Designing Thrower
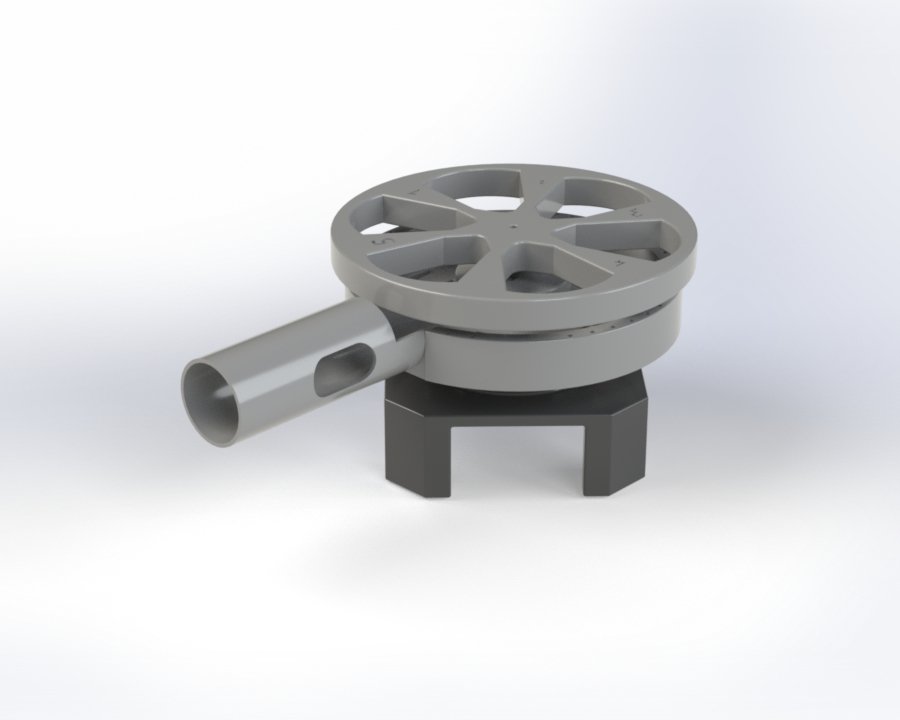
The projectile launch system is inspired by the operating principles of tennis ball launching machines and is designed for reliable and repeatable target engagement. The system utilizes a controlled feeding mechanism that transfers projectiles smoothly from the storage section into the firing stage, ensuring consistent launch behavior. Special attention was given to mechanical balance, feeding angle, and transfer continuity to minimize jams and operational interruptions. Through careful optimization of the magazine geometry and firing interface, the system delivers stable and predictable performance, enabling accurate target engagement under dynamic mission conditions. This design prioritizes mechanical simplicity and reliability, making it well-suited for autonomous operation in competitive environments.
Version 1
The initial servo-controlled feeding mechanism was revised to address center of gravity instabilities and the mechanical complexity of the lower gear assembly, leading to a more optimized design.
Version 2
Inconsistencies in the loading cycle, stemming from the steep incline of the magazine unit, necessitated a redesign of the storage section to rectify servo-gate malfunctions and ensure consistent firing performance.
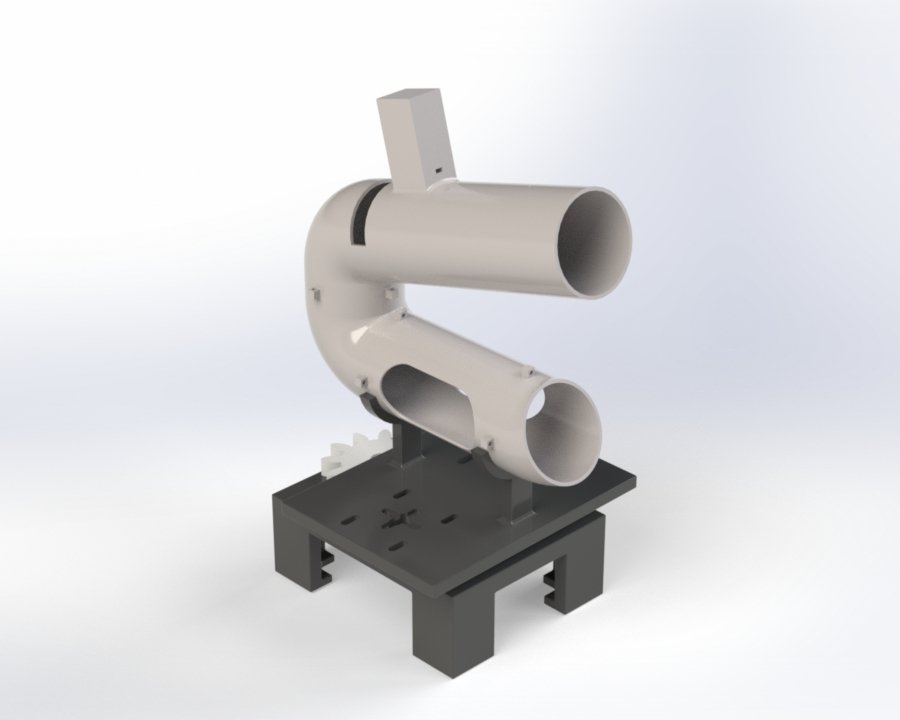
Version 3
Incorporating insights from previous iterations, the final design utilizes an optimized angled magazine system to ensure seamless projectile transfer. This configuration effectively resolves the mechanical inconsistencies of earlier prototypes, achieving the desired operational reliability.
See Thrower in Action
Thrower Test

Designing Mission Software
The autonomy software stack is developed using ROS 2 Humble and follows a modular, layered architecture that separates perception, navigation, and mission control responsibilities. The perception pipeline is built using YOLO-based deep learning models integrated with OpenCV for image processing and validation, while numerical computations and geometric transformations are handled using NumPy. Hardware-level communication, including actuator and microcontroller interfaces, is implemented via PySerial. This architecture allows individual subsystems to be independently tested, tuned, and reused across multiple RoboBoat tasks, ensuring robustness and scalability.

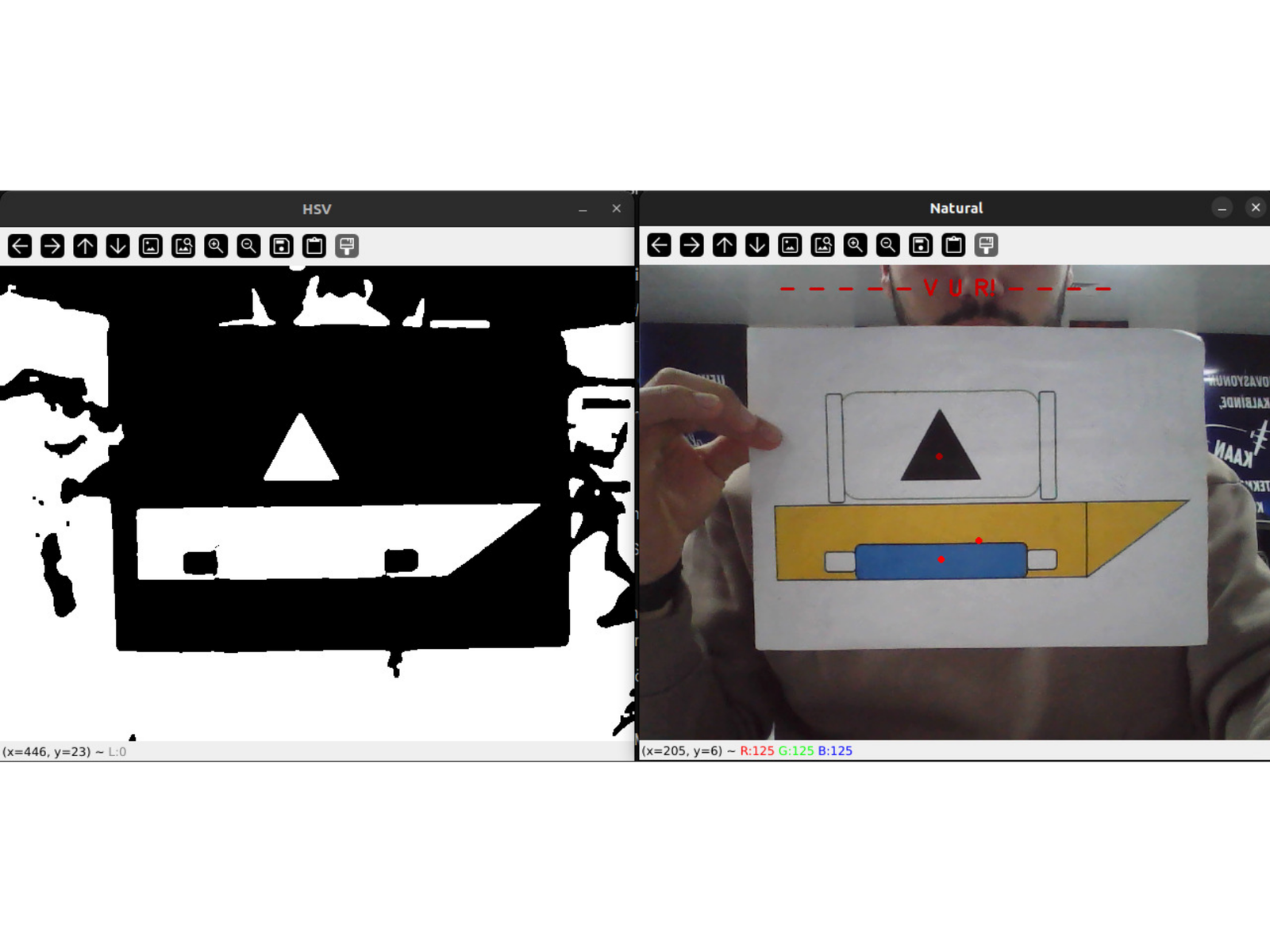
Vision System Development
The vision system is implemented as a modular perception pipeline based on deep learning (YOLO). Raw detections are filtered through confidence thresholds, geometric validation, and temporal stabilization to eliminate false positives.
To ensure stable behavior under real-world conditions, validated detections are passed through a fusion layer that associates and smooths object data over time. Only these fused targets are exposed to the autonomy system, preventing control instability caused by noisy perception.
Waypoint-Based Navigation System
The navigation system acts as an execution layer that converts autonomy decisions into controlled vehicle motion. It operates entirely on waypoint-based planning, enabling predictable and repeatable trajectories in marine environments.
The system continuously monitors task execution and vehicle behavior. In the event of path planning errors, perception loss, or unsafe conditions, it reliably transitions the vehicle into a safe-stop state.
Main Autonomy and FSM Architecture
At the core of the system lies a Finite State Machine (FSM) that synchronizes perception, navigation, and mission execution. Each task is implemented as an independent module interfacing with the FSM and returning atomic status values (Running, Success, Failure).
The FSM deterministically controls mission flow:
- Successful execution advances the mission
- Failures trigger recovery logic, retries, task skipping, or safe-stop states
This hierarchical state architecture ensures predictable behavior, simplifies debugging, and increases robustness under dynamic environmental conditions.
Testing, Simulation, and Validation
Before on-water trials, all algorithms are validated in a Gazebo simulation environment integrated with ROS. The simulation models vehicle dynamics, buoyancy, and sensor noise, allowing extensive testing of perception and control logic.
This process allows most software issues to be resolved before hardware integration, significantly reducing risk during competition runs.
Communication and Safety
The USV communicates with the Ground Control Station (GCS) via Wi-Fi, transmitting real-time telemetry, mission status, battery information, and live camera feeds.
For safety-critical operations, a redundant RF communication link provides hardware-level emergency stop (e-stop) and manual override capability, ensuring immediate intervention when required.