

Capabilities
Mission Duration
Range
Max Speed
Waypoints
Mission Execution
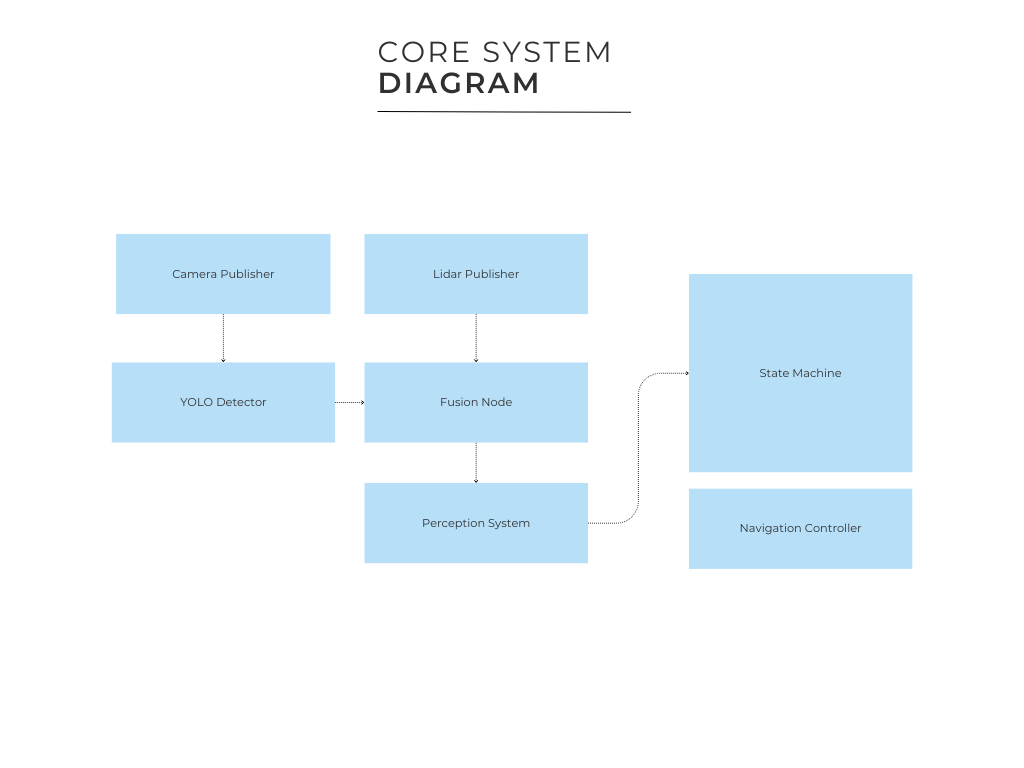
The USV perceives its environment using a deep learning–based vision system that detects gates, buoys, obstacles, docking markers, and task-specific targets. Detected objects are filtered, validated, and stabilized before being used by the autonomy layer. This ensures that mission decisions are always based on reliable and consistent target information.
To increase robustness, additional validation logic and sensor fusion mechanisms are employed to handle partial detections, noise, and temporary perception loss. This allows the vehicle to maintain task continuity even under degraded sensing conditions.
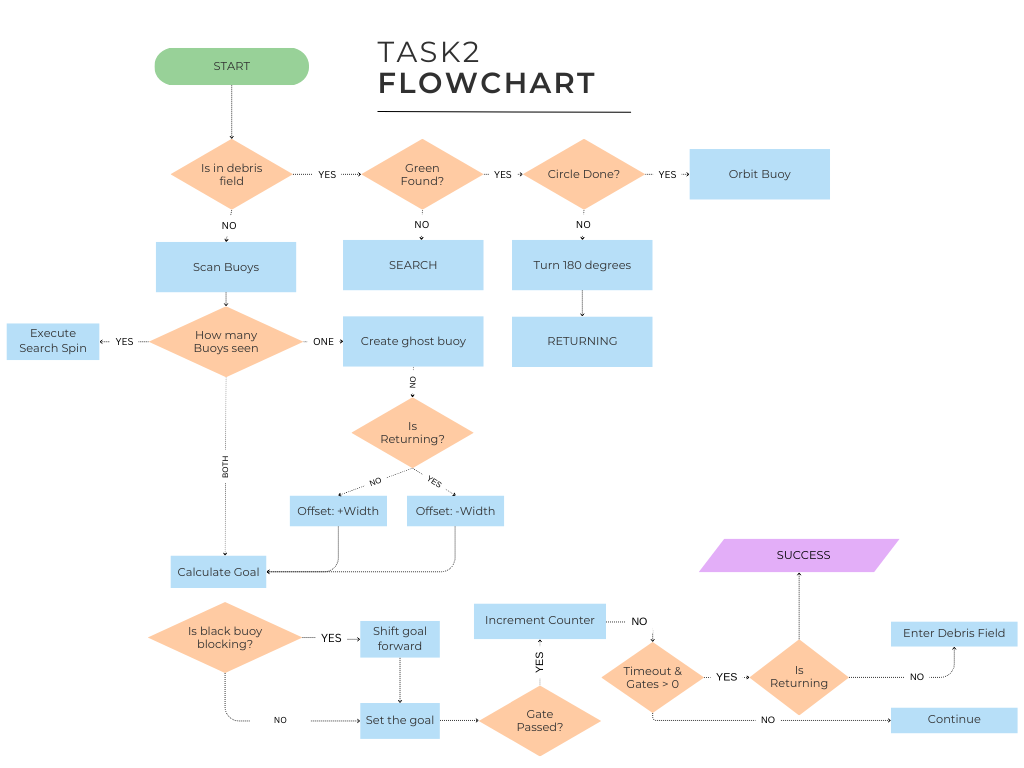
For gate navigation tasks, the USV identifies red–green buoy pairs and computes the geometric midpoint of each gate as its primary navigation target. The vehicle autonomously advances through successive gates using waypoint-based motion control.
If full gate perception is unavailable, the system internally estimates the missing geometry using a virtual target (ghost buoy) concept. A time-limited forward progression strategy ensures that the vehicle continues the task without becoming stuck, while still maintaining safety.
During debris clearance, the system dynamically selects the most suitable gate based on obstacle placement. If an obstacle blocks the gate center, the target point is reconfigured to allow safe passage.
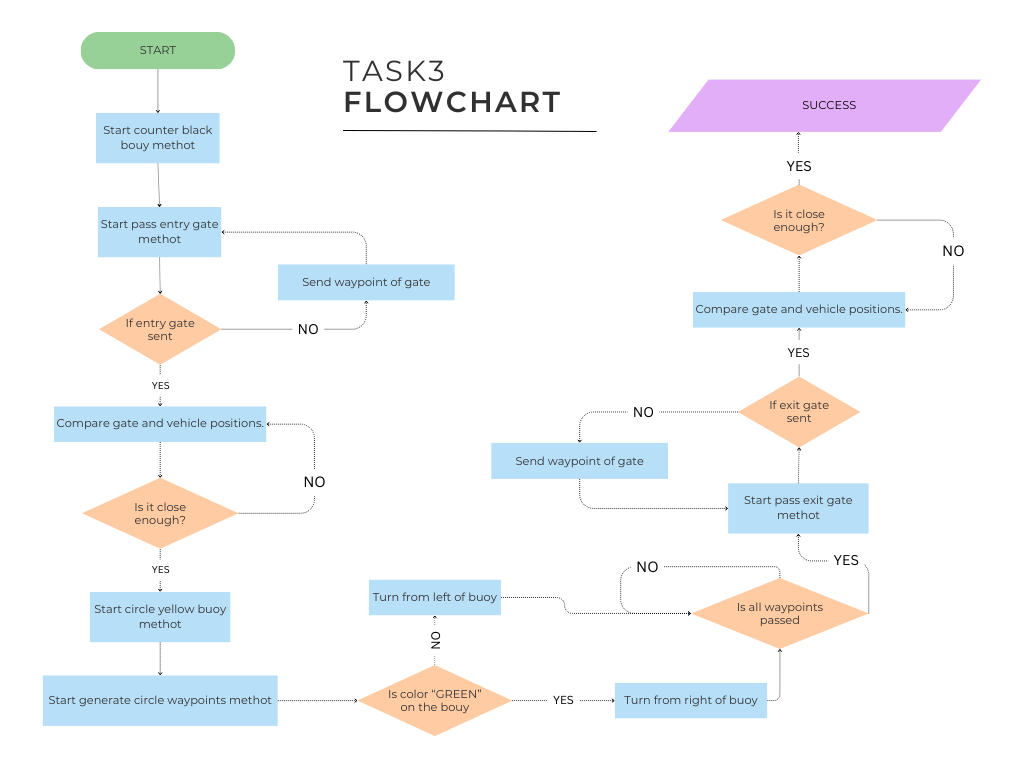
In the Emergency Response Sprint task, the USV first passes through an entry gate and transitions into a search mode to locate an active light beacon. Once the beacon color is identified, the vehicle performs a directional circular maneuver around the corresponding buoy using relative geometry.
The circular motion is executed via discrete waypoints, ensuring smooth and stable navigation. After completing the maneuver, the vehicle autonomously returns through the entry gate. If reliable sensor data is lost at any stage, failsafe logic ensures a controlled stop.
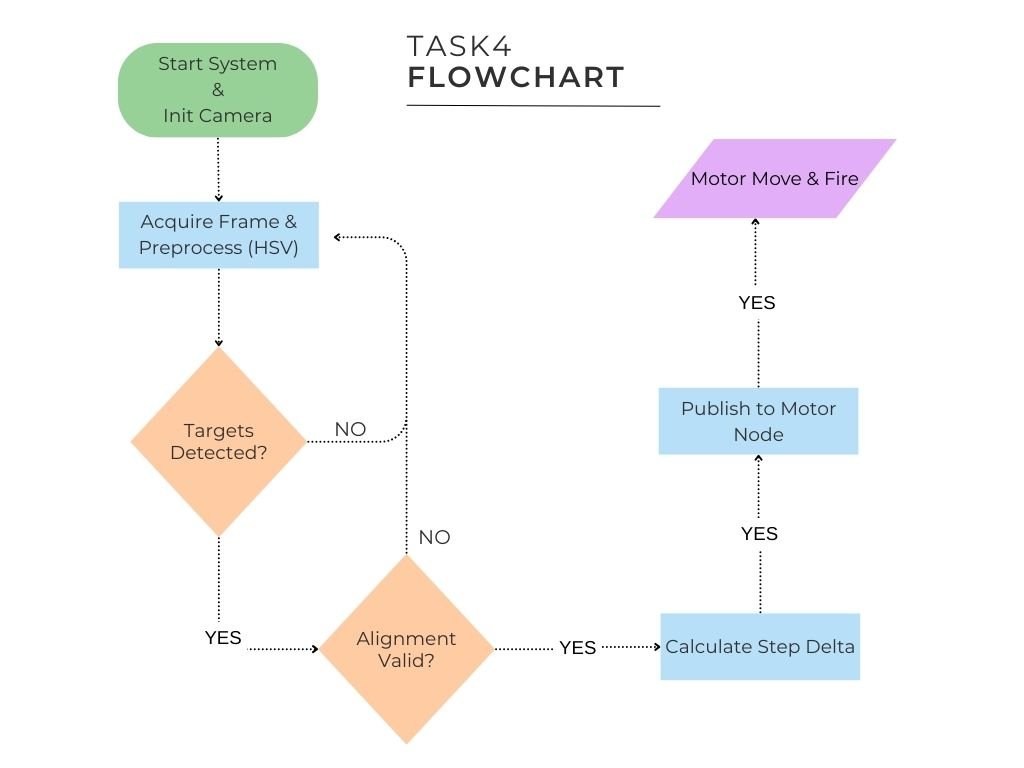
For the Supply Drop task, the system performs vision-guided actuator control. YOLO-detected target coordinates are mapped from pixel space to actuator space by calculating the horizontal pixel error relative to the image center. This error is converted into angular deviation and then into stepper motor steps using calibrated parameters.
Once alignment conditions are satisfied, an Arduino-controlled, relay-isolated 12V / 3A water pump is activated to release the payload accurately and safely.
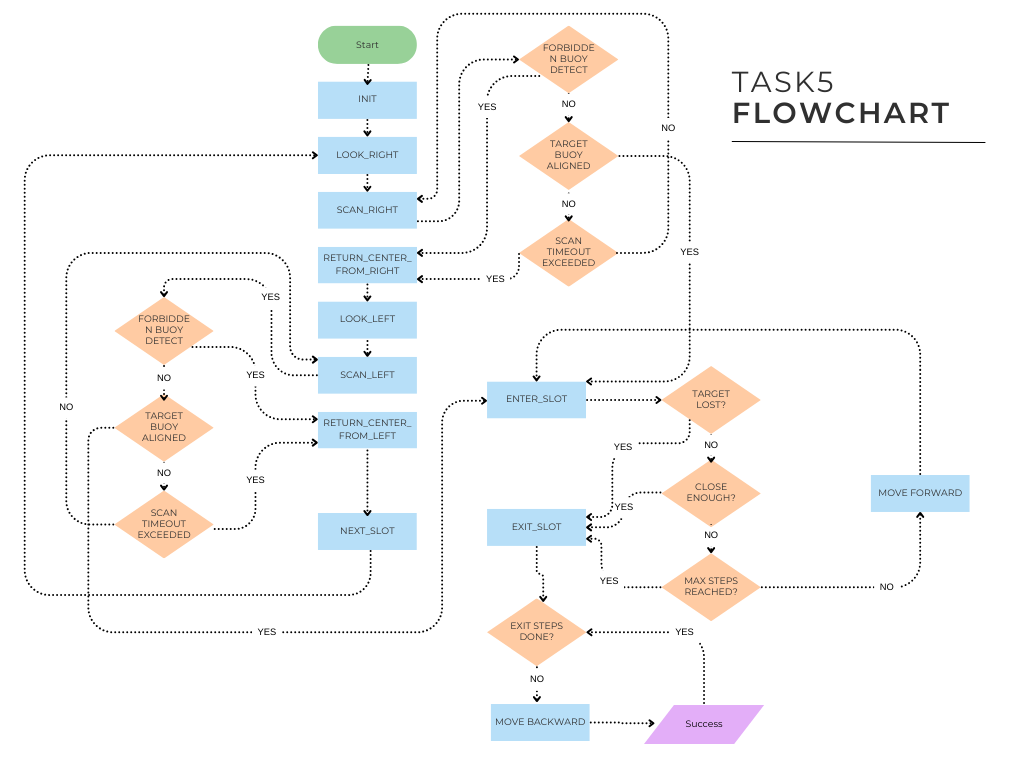
In the Navigate the Marina task, the USV scans docking slots using color-based visual classification. It autonomously identifies the correct slot, aligns itself, and performs a controlled docking maneuver. Incorrect or occupied slots are skipped systematically.
For the Harbor Alert task, the vehicle uses an underwater hydrophone system to detect an acoustic pinger. Direction-of-Arrival (DOA) estimation guides the USV toward the sound source, where it holds position to confirm the alert zone.
Components

CubePilot Cube Orange
A triple-redundant, vibration-dampened flight controller that executes autonomous navigation and stabilizes the vehicle using extended Kalman filtering.

DEGZ Ultras Thruster
A high-efficiency brushless underwater motor featuring magnetic coupling technology to eliminate shaft seals and prevent water leakage.

Masterflight 6S 10000mAh Battery
A high-performance 22.2V Li-Po battery with a 65C discharge rate, serving as the primary energy source to handle peak propulsion loads without voltage sag.

CubePilot HERE 4
A multi-band RTK GNSS module utilizing the CAN FD protocol to provide centimeter-level positioning accuracy for waypoint navigation.

RFD900X Telemetry Modem
A long-range, AES-encrypted radio modem that establishes a reliable bi-directional data link between the vehicle and the Ground Control Station.

Surpass Hobby KK 150A ESC
A waterproof electronic speed controller designed to handle high continuous currents and provide smooth thermal management for the propulsion system.
KNPDB-02140 Power Distribution Board
Our products are designed for easy integration, ensuring a smooth transition and immediate productivity.

Jumper T-14 Radio Transmitter
An ergonomic, open-source radio controller running EdgeTX firmware and featuring precision CNC Hall sensor gimbals. It serves as the primary ground control station interface for manual teleoperation, offering low-latency command transmission and customizable telemetry display.

RPLIDAR A1
A 360-degree 2D laser scanner used for real-time obstacle detection and local mapping of the environment.

NVIDIA Jetson Xavier NX
The central mission computer delivering 21 TOPS of AI performance, mounted on an industrial carrier board for enhanced vibration resistance and power stability.

Logitech C920s PRO
A 1080p USB camera utilized for computer vision tasks, including object detection, color classification, and target tracking.
Stepper Motors (NEMA 17)
Precision motors used in conjunction with the CNC shield to control the angular positioning of the turret and the ball feeding mechanism.

Arduino Uno
A dedicated microcontroller responsible for managing mission-specific actuators, including the ball launcher and water cannon systems.
CNC Shield V3
An expansion board integrated with the Arduino Uno to drive stepper motors with micro-stepping precision for accurate turret aiming.

Seaflo 1100GPH Bilge Pump (12V)
A fully submersible, high-capacity pump capable of delivering 1100 GPH flow rate, selected to ensure a consistent and powerful water stream for target engagement tasks while operating on a dedicated power circuit.nt inductive loads, such as the water pump, using low-voltage logic signals.

Sunnysky X2814 1250KV Brushless Motor
A powerful brushless outrunner motor with a 1250KV rating, driven by the Skywalker 60A ESC. It is utilized to actuate the ball launcher mechanism, delivering high RPM and consistent torque for precise mechanical operations.

2S Li-Ion Battery
An independent auxiliary power source dedicated solely to the Emergency Stop logic circuit, ensuring safety systems remain active even during main battery failure.

80A ELO Power Relay
A high-current automotive relay that physically disconnects the propulsion system from the power source when the emergency stop circuit is triggered.

E-Stop Button (Mushroom Head)
An IP65-rated latching emergency button with a twist-to-release mechanism, allowing for immediate physical termination of the propulsion system.

Hobbywing Skywalker 60A V2 ESC
A lightweight brushless electronic speed controller featuring a built-in 5V/5A switch-mode UBEC. It provides efficient power regulation to the motors, handling continuous currents up to 60A with burst protection.